首先来看一下什么是欧拉角(Euler angles)?
构件在三维空间中的有限转动,可依次用三个相对转角表示,即进动角、章动角和自旋角,这三个转角统称为欧拉角。——引自百度百科
莱昂哈德·欧拉用欧拉角来描述刚体在三维欧几里得空间的取向。对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的。——引自wikipedia
好了,引完了,我来说一下我的理解吧,欧拉角是对旋转的一种刻画方式,就像其他刻画方式一样如旋转矩阵,四元数。欧拉角对应的旋转矩阵可以看作是三个绕轴旋转的旋转矩阵的复合。
问题来了,三个绕轴旋转的旋转矩阵绕的是什么坐标系下的轴?
对于坐标系E下的欧拉角(α,β,r)和以下哪个旋转矩阵是等价的
1.绕坐标系E下的x轴旋转α,绕坐标系E下的y轴旋转β,绕坐标系E下的z轴旋转r,三个矩阵的复合
2.绕坐标系E下的x轴旋转α,绕 坐标系E在绕x轴旋转α后的新系E'下的y轴旋转β,绕 坐标系E'在绕y轴旋转β后的新系E''下的z轴旋转r,三个矩阵的复合
通俗的讲,我们在旋转时,要不要把坐标系一起转动?
事实上两种理解都可以,当然,两种转法并不等价,下面我来解释这个问题,
当我们讲到坐标系E下的欧拉角(α,β,r)时,这句话是有歧义的,我们必须定义旋转顺序,因为旋转顺序会影响旋转结果。
如果假设旋转顺序是先绕x轴再y轴再z轴,x-y-z,那么这个欧拉角对应的旋转矩阵是指上述的2所表示的旋转矩阵。
如果假设旋转顺序是先绕z轴再y轴再x轴,z-y-x,那么这个欧拉角对应的旋转矩阵是指上述的1所表示的旋转矩阵,等等,你肯定会问,这难道不是把2中的先后顺序换一下就行了吗,"绕坐标系E下的z轴旋转r,绕 坐标系E在绕z轴旋转r后的新系E'下的y轴旋转β,绕 坐标系E'在绕y轴旋转β后的新系E''下的x轴旋转α,三个矩阵的复合"难道不是这样吗?是的,当然也是这样。
下面我来证明两种复合方式是相等的,
为了方便证明我先定义一些记号,
记:
绕坐标系E下的x轴旋转α的旋转矩阵为Rx,
绕坐标系E下的y轴旋转β的旋转矩阵为Ry,
绕坐标系E下的z轴旋转r的旋转矩阵为Rz,
绕坐标系E下的z轴旋转r的旋转矩阵为Rr(Rr=Rz),
绕 坐标系E在绕z轴旋转r后的新系E'下的y轴旋转β的旋转矩阵为Rb,
绕 坐标系E'在绕y轴旋转β后的新系E''下的x轴旋转α的旋转矩阵为Ra,
另外,将矩阵R的逆记作R~
求证:Rx*Ry*Rz = Rr*Rb*Ra
证明:
Rr = Rz 定义就是一样的,显然相等
Rb = Rr~*Ry*Rr 要得到绕 坐标系E在绕z轴旋转r后的新系E'下的y轴旋转β的旋转矩阵为Rb,可以先应用Rr~这时可以视作在E下,然后使用E下的旋转Ry绕旧的y轴旋转,在应用Rr转回到E'
Ra = (Rr*Rb)~*Rx*(Rr*Rb) 理由同上
所以 右边=Rr*Rb * Ra
=Rr*Rb * (Rr*Rb)~*Rx*(Rr*Rb)
=(Rr*Rb)* (Rr*Rb)~*Rx*(Rr*Rb)
=Rx*(Rr*Rb)
=Rx*(Rr*Rr~*Ry*Rr)
=Rx*Ry*Rz =左边
#证毕
这与DirectX在文档中对D3DXMatrixRotationYawPitchRoll的描述是一致的

D3DXMATRIX * D3DXMatrixRotationYawPitchRoll(
D3DXMATRIX *pOut,
FLOAT Yaw, //绕y轴的转动角
FLOAT Pitch, //绕x轴的转动角
FLOAT Roll //绕z轴的转动角
);
The order of transformations is roll first, then pitch, then yaw. Relative to the object's local coordinate axis, this is equivalent to rotation around the z-axis, followed by rotation around the x-axis, followed by rotation around the y-axis.
关于欧拉角讲到这里就差不多了,下面来探讨一个和欧拉角有关的概念万向节死锁。
讲到欧拉角一般都会提到万向节死锁,什么是万向节死锁(Gimbal Lock)呢?
万向节死锁有时又被简称为万向节锁或者万向锁,是指当三个万向节其中两个的轴发生重合时,会失去一个自由度的情形。
下面的视频很好的说明了这一点。
正因万向节死锁的存在,使用欧拉角是无法实现球面平滑插值的,
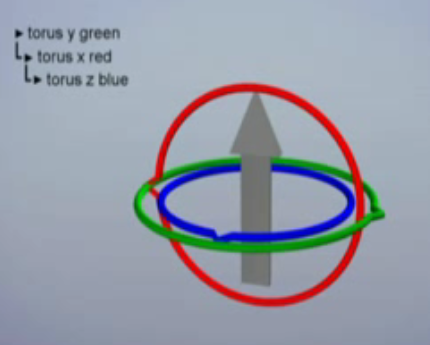
如上图,此时如果下一帧要让箭头指向右侧后方,那么绿色和蓝色对应的旋转角必定要发生突变,因为目前如果想朝着垂直红色圈的方向旋转箭头就像被卡住一样,我想这就是叫它死锁的原因吧。
总之万向节死锁会导致位置上连续变化 在数值表示上确是非连续的。给定的两个关键帧之间无法平滑过渡。顺便提一下解决方法,可以使用四元数球面线性插值(Slerp)